
")
ABSTRACT:
The Android Mobile Phone Platform by Google becomes more and more popular among software developers, because of its powerful capabilities and open architecture. As its based on the java programming language, its ideal lecture content of specialized computer science courses or applicable to student projects. We think it is a great platform for a robotic system control, as it provides plenty of resources and already integrates a lot of sensors. The java language makes the system very attractive to apply state-of-the-art software engineering techniques, which is our main research topic. The unsolved issue is to make the android device interoperate with the remaining parts of the robot: actuators, specialized sensors and maybe coprocessors. In this paper we discuss various connection methods and present a first approach to connect Android with the desire tool robotics system, which we successfully used in our robotics/software engineering courses so far.
Android platform is a new generation of smart mobile phone platform launched by Google. Android provides the support of Sensors and Bluetooth. The development of this project has the goal of controlling an android robot car. The movement of the robot car is been controlled by the accelerometers in mobile with x,y,z values and these values are send to the development board on robot car using blue-tooth.
In this system we can control the robot car direction and head lights by simply sliding the mobile in x, y and z directions.
Here we are using the Bluetooth technology to interface robotic car to mobile wirelessly.
PURPOSE:
The wireless communication technologies are rapidly spreading many new areas, including the automation and the importance of the use of wireless technologies in the data acquisition, building control, monitoring systems and automation of manufacturing processes will grow. Intelligent mobile robots and cooperative multi robotic systems can be very efficient tools to speed up search and research operations in remote areas. Robots are also useful to do jobs in areas and in situations that are hazardous for human. They can go anywhere that is not reachable my humans and can go into gaps and move trough small holes that are impossible for humans and even trained dogs.Our preliminary aim in this project is to build a Mobile operated ARM7 based robot, which could be able to move in forward backward right and left directions. By using mems on the Mobile. The robot can be moved in all the above specified directions. And the transmission of wireless signals can be carried by using Bluetooth communication.
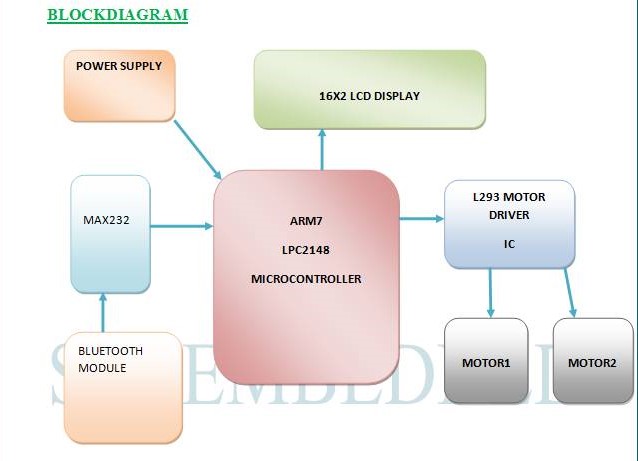
The robot is fitted with 2 DC geared motors and to control its operation we are using LPC2148 as controller. In this project we are using LPC2148, DC Geared motors, Bluetooth (Tx,/Rx) is used to for the navigation of robot. In this project, L293D H-Bridge is used to drive the geared DC motor.ARM7TDMI is an advanced version of microprocessors and forms the heart of the system.
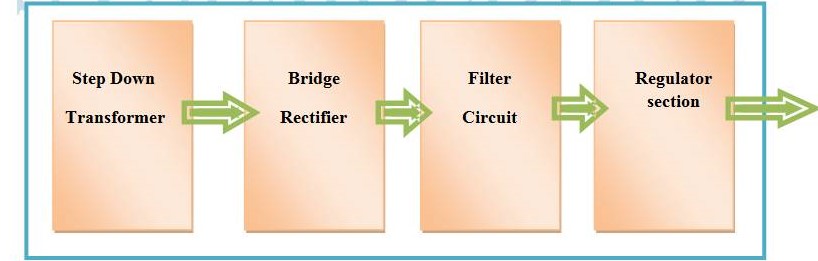
POWER SUPPLY:
BLOCK DIAGRAM:
RECEIVER SECTION:
OUTPUT WINDOW:
SOFTWARE AND HARDWARE TOOLS:
Software Tools:
- KEILUV4 IDE TOOL
- ISP PROGRAMER
- EMBEDDED C PROGRAMMING
- FLASHMAGIC
- Android platform ver 2.3
Hardware Tools:
- ARM7TDMI LPC2148
- MAX232
- LCD DISPLAY
- BLUETOOTH
- POWER SUPPLY
- TEMPERATURE SENSOR
- FIRE SENSOR
- DRIVER IC
RESULT:
Based on embedded system the application of wireless network connection realized the remote controlling of mobile robot, ensured the software control system, and guaranteed the accurate delivery between different equipment. The experimental results showed that through the application of the embedded equipment, the Android mobile robot energy consumption decreased significantly, and could complete remote operation control functions perfectly.











{kind=link}